Originally posted by purelyprimitives
View Post
Asymmetrical in each quadrant is desirable and that is what is happening, but we don't want the inertial propulsion, we want all the output force to be concentrated into the output shaft and not to be dissipated in the whole machine moving across a floor.
There is no relationship with the Skinner machine and a flywheel - not in a "one-pole" system and not in a "four-pole" system.
I'm seeing the flywheel conversation go around in various areas, but there is no flywheel action here. I explained that before and I see Mike touched on it a bit.
Here is an extension to my past explanation and just looking at the operation is prima facie evidence that there is no flywheel action in the machine. That is not what it is about.
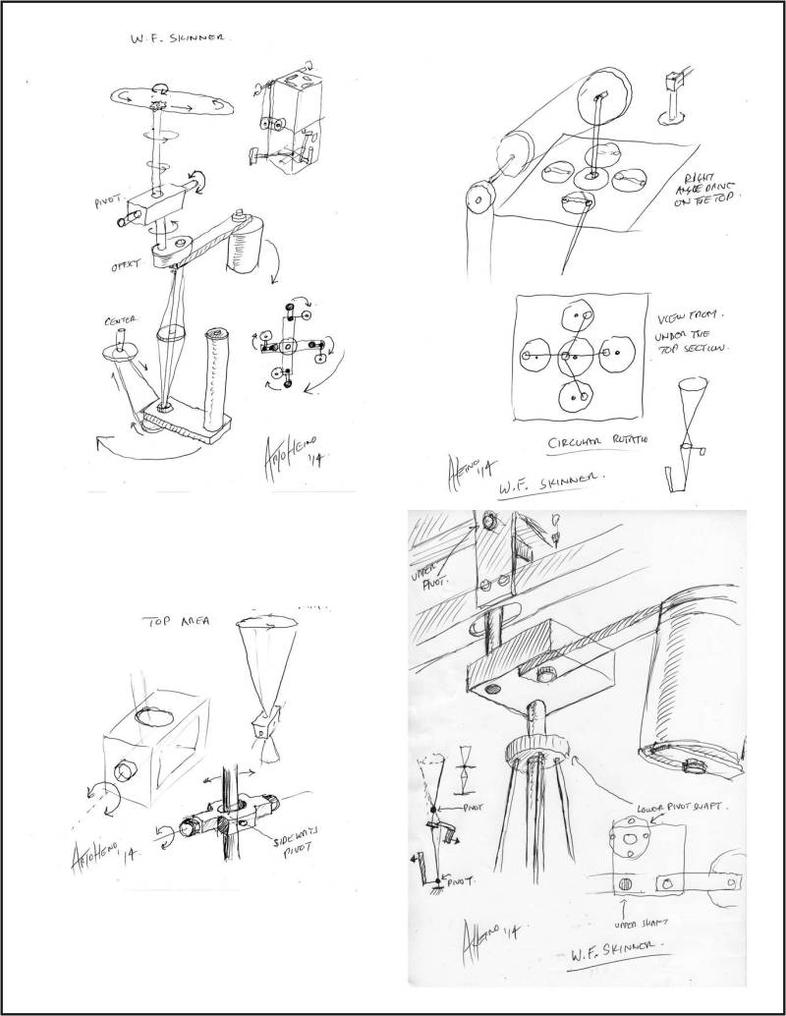
If the output is suddenly locked up - the lower weight will only swing around for a short period of time. As the lower shaft is locked in position and in its angle, there is the inside of the incline and the outside of the incline.
As the weight moves around towards the outside of the incline, it goes up against gravity losing some of its momentum and on its way back down, it picks up a bit, but the overall loss is greater than the gain meaning it is absolutely does not function as a flywheel.
If we have the same weight as the lower weight evenly distributed in a circle around a shaft and it is going the same speed as the Skinner machine and the mechanism stops, but the weight is allowed to continue to spin, it will spin for quite a while because of the even distribution of weight - even if it was on a tilt.
If you want to talk about flywheels, it has to be consistent with how a flywheel operates.
If we have a merry go round that is perfectly round with even distributed weight and it is spun, it will last a while because of this - it is designed to keep the momentum going with the least amount of loss.
Now take that same merry go round and put a protrusion on one part of it that hits a fixed protrusion from the ground every time it goes around one rotation. Each time it gives up some motion and slows down - that is a very sorry flywheel as it is completely contradictory to what a flywheel is. Well, this particular example is exactly what the Skinner lower weight is - NOT a flywheel. Even with the machine in motion, the lower weight is NOT a flywheel as it counters the need to have evenly distributed weight in order maintain its movement with the least amount of loss.
I really don't see how it can be logically argued to be a flywheel when the necessary parameters that are needed to be met are not even incorporated into the Skinner machine - not even in the slightest bit.




Leave a comment: